February 10, 2019
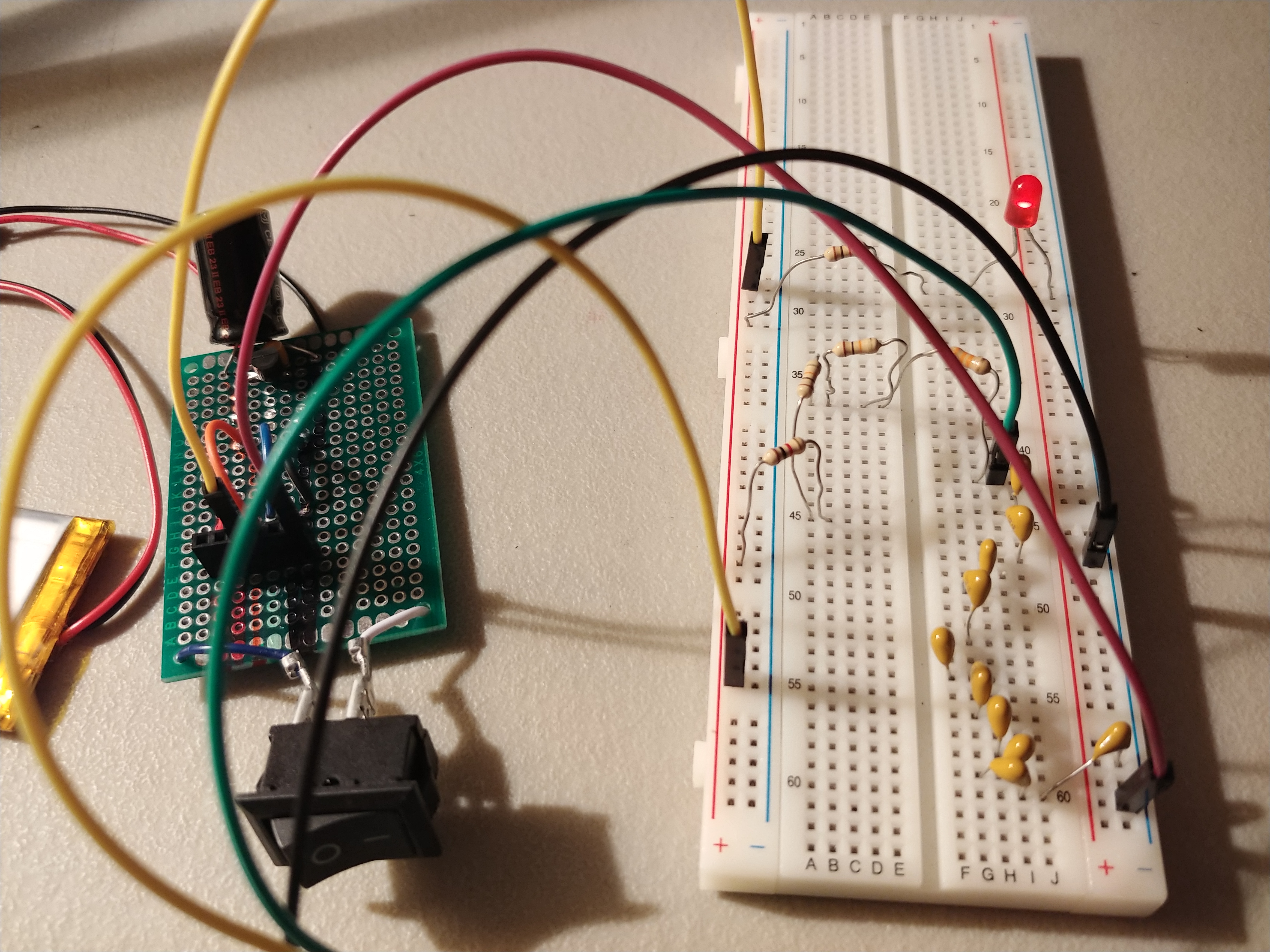
The video below shows the output of the gyroscope/accelerometer on the Schmartboard to a serial terminal. This data has been successfully sent to Unity, but it is difficult to get screen captures from the game that actually show the data being read in without lag. So, we are demoing the reading of data on a serial terminal. We are using a 3.7 V lipo battery which is rechargeable through a USB port. We also use a low dropout regulator (LDO) with low quiescent current to drop the voltage down to 3.3 V for operation of the MSP430 and its peripherals. There are also some decoupling capacitors placed between the output of the LDO and ground. We bought some rocker switches, which are really tactile, to switch the power on and off.
We learned that in order to run the MSP430 off this battery/LDO combination, we have to utilize the Chart below from the MSP430 data sheet:
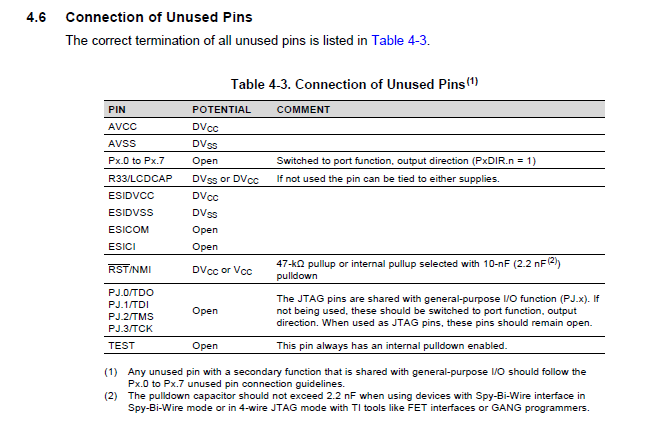
The main problem we faced before was not connecting /RST with a pullup resistor of 47kOhms and pulldown capacitor of 100 nF. If the RST pin isn’t pulled high, the MSP430 will not run code. The capacitor is also EXTREMELY important. At first, I used a 0.1 uF capacitor just because some of these recommendations aren’t exact, and I read TI forum posts indicating some people had success using larger capacitors than recommended. (And I only had 0.1 uF on hand.) But my code did not run at all. No interrupts were ever triggered, and no communication with the Bluetooth module could be established (although it could still be successfully paired, as the pairing is not reliant on UART communication through the MSP430).
I did not have a 100nF capacitor on hand, so I put 10 0.1uF ceramic capacitors in series. I also did not have a 47 kOhm resistor, so I used a series equivalent. Obviously, we will acquire the correct valued capacitors and resistors for our PCB, but it was good to confirm the function of our circuit. I will also solder a small protoboard with these resistors and capacitors so we have a more permanent circuit than a breadboard. However, we did confirm that our circuit does work.